無刷電機(jī)的相序控制原理
無刷電機(jī)的相序控制原理,無刷電機(jī)(Brushless DC Motor,BLDC電機(jī))因其高效率和可靠性而廣泛應(yīng)用于各種現(xiàn)代技術(shù)設(shè)備中。與傳統(tǒng)的有刷電機(jī)相比,無刷電機(jī)在設(shè)計和控制上有著顯著的不同。相序控制是無刷電機(jī)操作中的一個關(guān)鍵概念,它直接影響到電機(jī)的運(yùn)行性能和效率。無刷電機(jī)廠家將詳細(xì)探討無刷電機(jī)的相序控制原理,幫助讀者深入理解這一技術(shù)在無刷電機(jī)中的應(yīng)用和重要性。
一、無刷電機(jī)的基本結(jié)構(gòu)與工作原理
無刷電機(jī)主要由以下幾個部分組成:
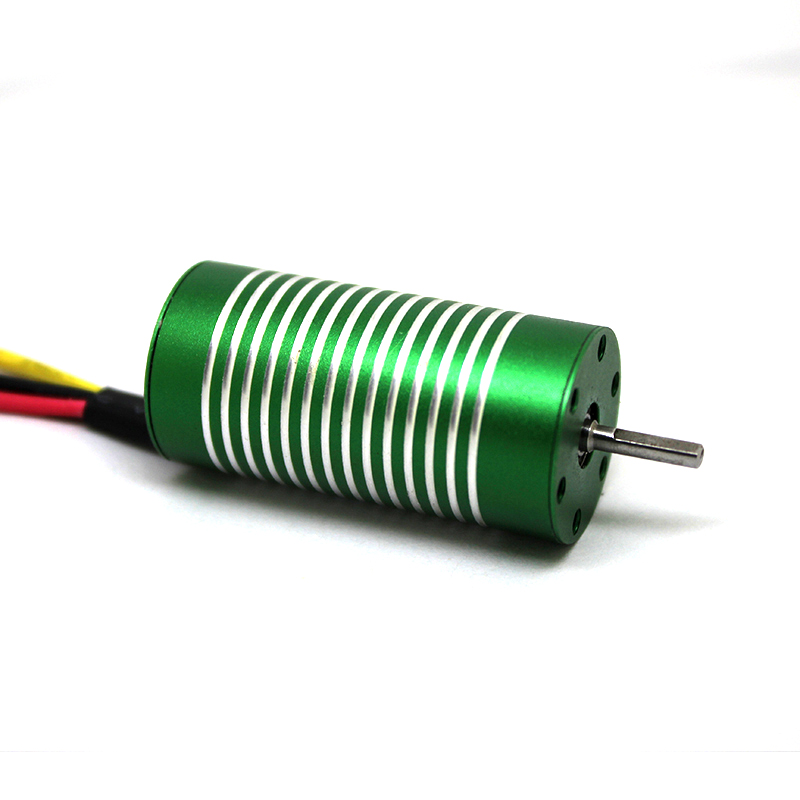
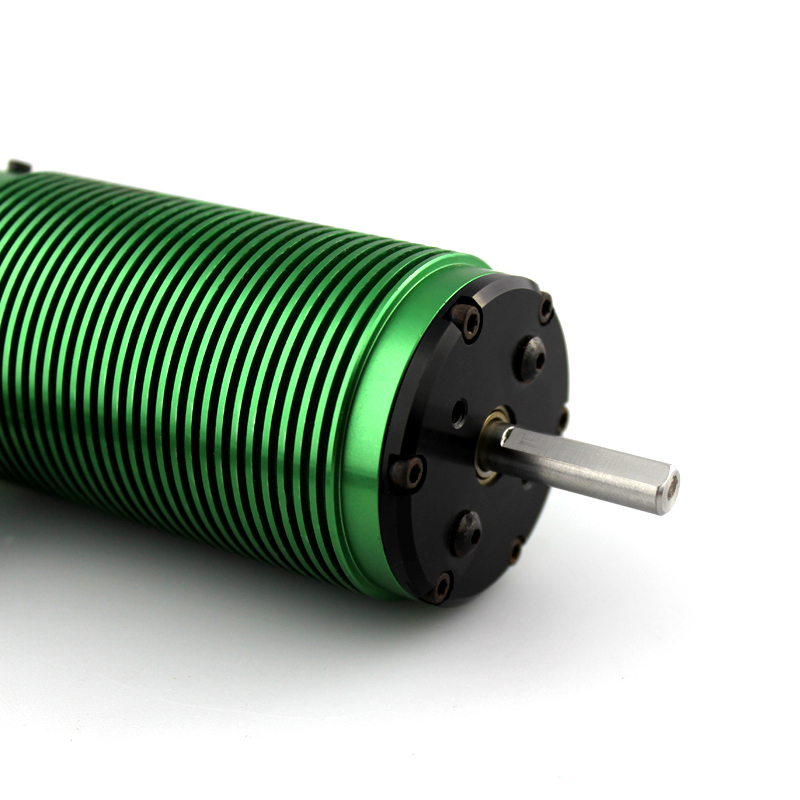
- 定子:定子是電機(jī)的靜止部分,通常由繞組和鐵芯組成。電流通過定子的繞組產(chǎn)生旋轉(zhuǎn)磁場。
- 轉(zhuǎn)子:轉(zhuǎn)子是電機(jī)的旋轉(zhuǎn)部分,通常由永磁體構(gòu)成。轉(zhuǎn)子在定子產(chǎn)生的磁場中進(jìn)行旋轉(zhuǎn)。
- 電子換向器:電子換向器用于控制電流在定子繞組中的流動,以維持轉(zhuǎn)子旋轉(zhuǎn)。它通過傳感器或傳感器less算法來檢測轉(zhuǎn)子的位置,并相應(yīng)地調(diào)整電流的方向。
二、相序控制的基本概念
相序控制(Phase Sequence Control)是無刷電機(jī)控制中關(guān)鍵的部分,它涉及到如何控制電流流向電機(jī)的不同繞組,從而產(chǎn)生一個旋轉(zhuǎn)磁場,使轉(zhuǎn)子得以旋轉(zhuǎn)。相序控制的基本概念包括以下幾個方面:
-
相序:無刷電機(jī)的定子繞組通常分為若干相(通常是三相),每一相對應(yīng)一個繞組。相序控制的核心是確定哪一相繞組接收到電流,從而生成旋轉(zhuǎn)磁場。
-
換相:換相是指在電機(jī)運(yùn)行過程中,電子換向器不斷地改變電流的流向,以維持轉(zhuǎn)子旋轉(zhuǎn)。換相的過程需要精確控制,以確保電機(jī)平穩(wěn)運(yùn)行。
-
轉(zhuǎn)子位置檢測:相序控制依賴于對轉(zhuǎn)子位置的實時檢測。通過傳感器(如霍爾傳感器)或傳感器less算法,控制系統(tǒng)能夠知道轉(zhuǎn)子的位置,從而調(diào)整電流的流向。
三、相序控制的實現(xiàn)方式
無刷電機(jī)的相序控制主要有兩種實現(xiàn)方式:傳感器控制和無傳感器控制。
-
傳感器控制
在傳感器控制系統(tǒng)中,霍爾傳感器或光電傳感器用于檢測轉(zhuǎn)子的位置。這些傳感器將轉(zhuǎn)子的位置反饋給控制器,控制器據(jù)此調(diào)整電流的流向。具體過程如下:
- 位置檢測:傳感器實時檢測轉(zhuǎn)子的位置,并生成相應(yīng)的信號。
- 換相:控制器根據(jù)傳感器信號,按照預(yù)定的相序控制電流流入定子的不同繞組。
- 電流控制:通過改變電流的流向,產(chǎn)生旋轉(zhuǎn)磁場,使轉(zhuǎn)子持續(xù)旋轉(zhuǎn)。
傳感器控制的優(yōu)點(diǎn)是反饋精確,能夠提供穩(wěn)定的轉(zhuǎn)速和扭矩。然而,這種方式也存在成本較高和復(fù)雜度較大的問題。
-
無傳感器控制
無傳感器控制系統(tǒng)依賴于算法和電動勢(Back EMF)來推斷轉(zhuǎn)子的位置。主要有以下幾種方法:
- 反電動勢(Back EMF)檢測:通過檢測繞組中的反電動勢來估算轉(zhuǎn)子的位置,并根據(jù)估算結(jié)果調(diào)整電流流向。
- 估算算法:使用數(shù)學(xué)模型和算法(如卡爾曼濾波)來預(yù)測轉(zhuǎn)子的位置,從而實現(xiàn)無傳感器控制。
無傳感器控制的優(yōu)點(diǎn)是成本較低,且結(jié)構(gòu)簡單,但對算法的要求較高,需要精確的電動勢估算和控制策略。
四、相序控制的優(yōu)化策略
為了提高無刷電機(jī)的性能,,確保相序控制的準(zhǔn)確性和穩(wěn)定性,以下幾種優(yōu)化策略可以考慮:
-
優(yōu)化換相算法
換相算法的優(yōu)化可以提高電機(jī)的運(yùn)行平穩(wěn)性和效率。先進(jìn)的換相算法能夠更精確地控制電流流向,減少換相過程中產(chǎn)生的電流波動。
-
提高位置檢測精度
在傳感器控制系統(tǒng)中,使用高精度的傳感器可以提供更準(zhǔn)確的轉(zhuǎn)子位置反饋。無論是霍爾傳感器還是光電傳感器,精度的提高都有助于改進(jìn)電機(jī)的控制效果。
-
改進(jìn)無傳感器算法
對于無傳感器控制系統(tǒng),優(yōu)化電動勢檢測和估算算法是關(guān)鍵。采用先進(jìn)的算法可以提高轉(zhuǎn)子位置的預(yù)測精度,從而提升電機(jī)的性能。
-
增強(qiáng)熱管理
高性能的相序控制可能會導(dǎo)致電機(jī)工作溫度上升。有效的熱管理策略可以幫助保持電機(jī)在適當(dāng)?shù)臏囟确秶鷥?nèi),防止過熱對控制系統(tǒng)造成影響。
五、結(jié)論
無刷電機(jī)的相序控制是確保電機(jī)高效穩(wěn)定運(yùn)行的核心技術(shù)。通過合理的相序控制,可以實現(xiàn)平穩(wěn)的轉(zhuǎn)速和高效的能量轉(zhuǎn)換。無論是傳感器控制還是無傳感器控制,每種方法都有其優(yōu)勢和適用場景。在實際應(yīng)用中,通過優(yōu)化換相算法、提高位置檢測精度和改進(jìn)無傳感器算法,可以顯著提升無刷電機(jī)的性能,滿足更高要求的應(yīng)用需求。理解和掌握相序控制原理,對于電機(jī)設(shè)計工程師和相關(guān)技術(shù)人員來說,是至關(guān)重要的。
-
01 如何解決電機(jī)異常電流問題:確保安全運(yùn)行 -
02 無刷馬達(dá)電機(jī)哪家質(zhì)量好?無刷電機(jī)品牌比較:為什么選擇X-TEAM? -
03 云臺電機(jī)過載是什么意思? -
04 直流無刷電機(jī)轉(zhuǎn)子的級數(shù)與定子的級數(shù)有關(guān)嗎?轉(zhuǎn)子級數(shù)與定子級數(shù)的關(guān)系探析 -
05 伺服電機(jī)發(fā)燙怎么解決?伺服電機(jī)發(fā)燙的解決方案 -
06 無刷電機(jī)抖動幾下就不轉(zhuǎn)的可能原因? -
07 無刷電機(jī)與同步電機(jī)的工作原理比較 -
08 無刷電機(jī)啟動不起來的原因及解決方案 -
09 無刷電機(jī)故障的常見維修方法